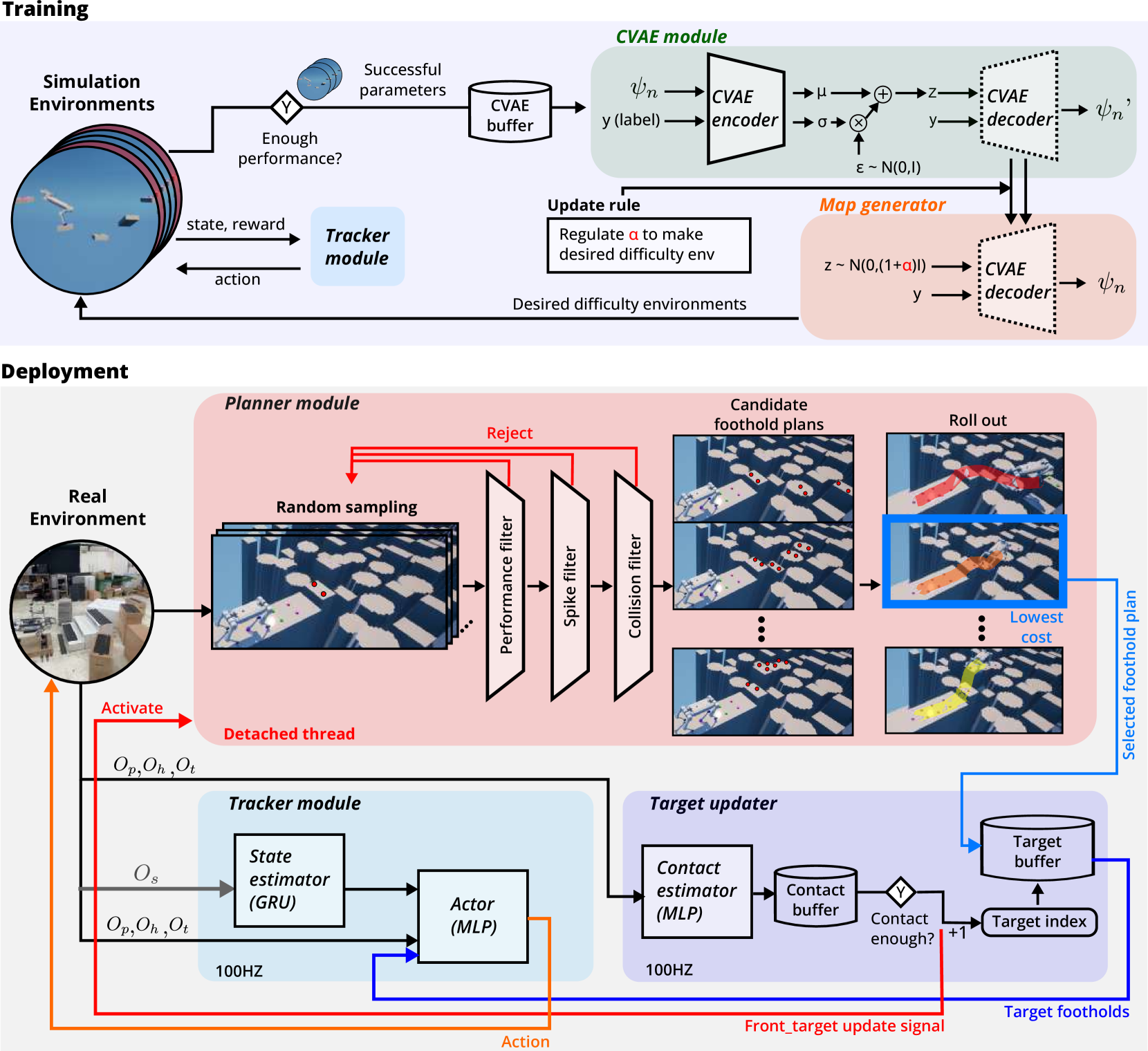
To achieve this, they approached the problem by breaking it down into two stages:
- Developing a planner for planning foothold positions. the planner module quickly searches for physically feasible foothold positions using a sampling-based optimization method with neural network-based heuristics and verifies the optimal path through simulation rollouts.
- Developing a tracker to accurately follow the planned foothold positions. the tracker module is trained to accurately step on planned positions, and tracking training is conducted through a generative model that competes in environments of appropriate difficulty.
hierarchical structure
Paper Title: High-speed control and navigation for quadrupedal robots on complex and discrete terrain, (https://www.science.org/doi/10.1126/scirobotics.ads6192 or https://arxiv.org/html/2506.02835v1)
YouTube Link: https://youtu.be/EZbM594T3c4?si=kfxLF2XnVUvYVIyk
To achieve this, they approached the problem by breaking it down into two stages:
hierarchical structure
Paper Title: High-speed control and navigation for quadrupedal robots on complex and discrete terrain, (https://www.science.org/doi/10.1126/scirobotics.ads6192 or https://arxiv.org/html/2506.02835v1)
YouTube Link: https://youtu.be/EZbM594T3c4?si=kfxLF2XnVUvYVIyk