Hong Ji Whan |
 Kin han su |
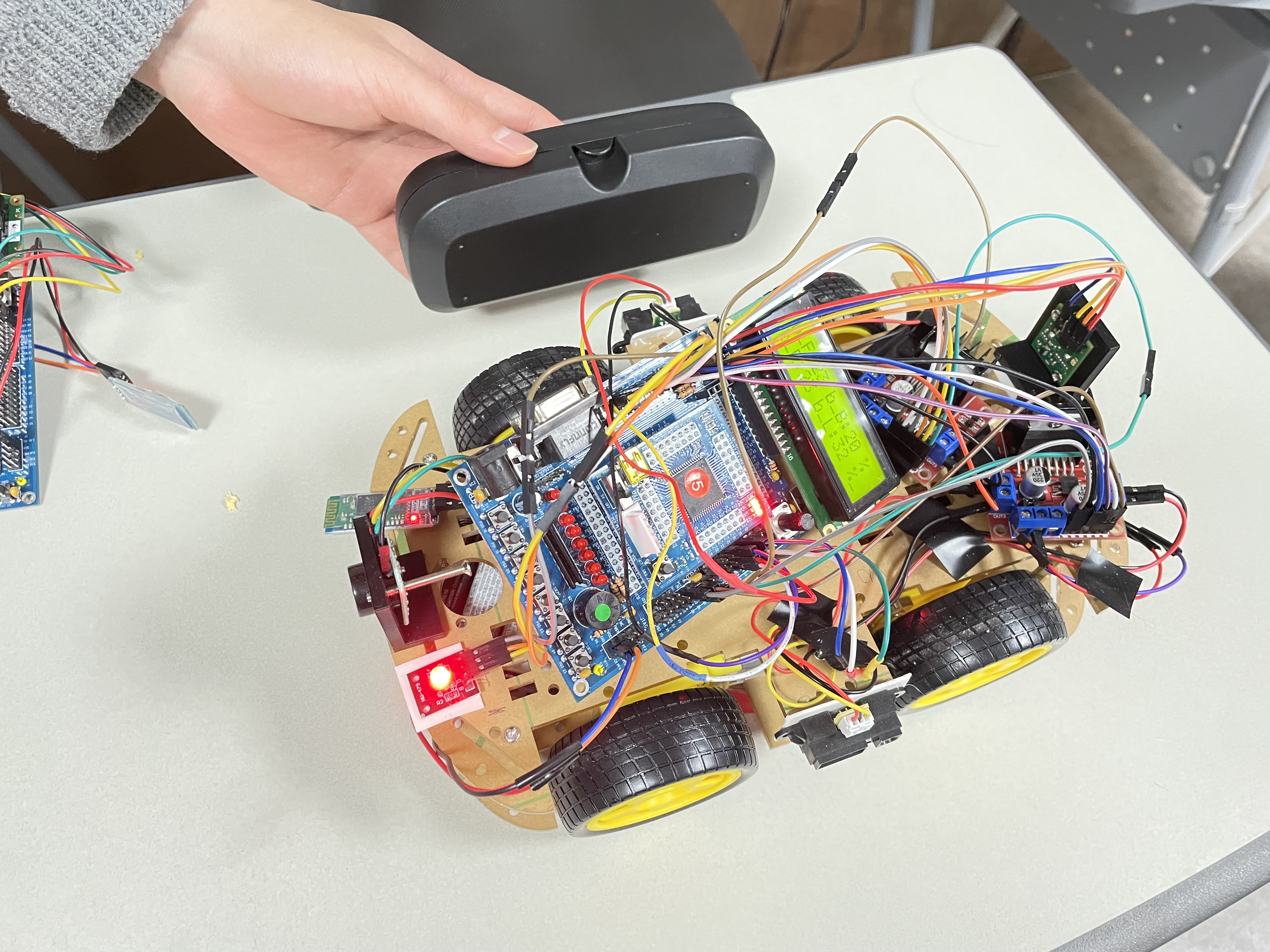
주행보조 및 주차 보조를 통한 운전자의 편의성 증대와 차량 긁힘 및 손상 방지를 위한 모델 RC카 설계
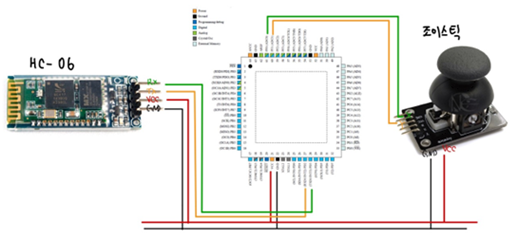
- 리모컨(Controller)
- 블루투스 HC-06 모듈로 블루투스 통신
- 조이스틱으로 전진, 후진, 전진 우회전, 전진 좌회전, 후진 우회전, 후진 좌회전 신호를 전송
- UART 통신을 이용하여 제어 신호 데이터를 차량에 전송
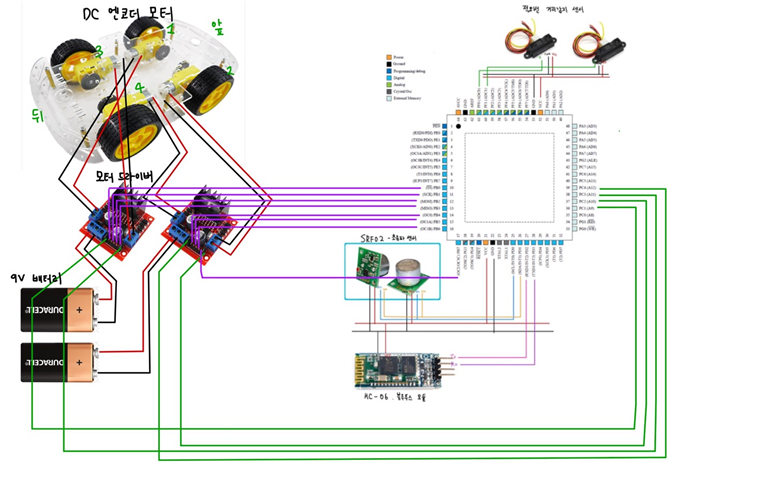
- 차량
- 블루투스 HC-06 모듈로 블루투스 통신
- UART 통신을 이용하여 리모컨으로부터 제어 신호 데이터를 수신
- 제어 신호에 따라 장애물이 없는 경우, 차량은 전진, 후진, 전진 우회전, 전진 좌회전, 후진 우회전, 후진 좌회전 동작을 수행
- 장애물이 있는 경우, 장애물 방향으로의 차량 동작은 금지되고, 아트메가 내장 부저음이 출력. 운전자가 부저음을 듣고 장애물이 차량 근처에 있음을 인지.
- 운전자는 장애물 방향으로의 차량 조작 동작은 전면 금지되고(운전자의 실수로 장애물 방향으로의 조작 동작을 예방하는 차원), 해당 장애물을 피하는 방향(반대 방향)의 동작만 실행.
- EX) 차량 앞쪽에 장애물이 있는 경우 : 전진, 전진 우(좌)회전 불가. 후진, 후진 우(좌)회전만 가능.
- Microchip studio sw program
- Atmega128
리모컨으로 RC카 조종 → RC카는 리모컨의 명령에 따라 동작한다. → 해당 동작 방향에 장애물이 있다면 동작하지 않음. 장애물이 있다는 부저음을 울리고 적색 LED를 점등하여 운전자에게 장애물이 있다고 주의해달라는 신호를 전달한다. → 장애물 방향이 아닌 방향의 동작만 작동한다. → 운행 종료 후에는 EEPROM에 저장된 카운트를 백분율로 환산하여 LCD에 표시한다. 해당 정보는 운전자의 운전 패턴 분석 및 운전 취약 부분을 파악하는데 사용할 수 있다.
- 주행 테스트 영상 https://www.youtube.com/watch?v=j78lOuiBxhw
- 센서 테스트 영상 https://www.youtube.com/watch?v=IxSM7H-Afjw
- 전방 장애물 인식, 전진 불가능 https://www.youtube.com/watch?v=5wfeqD1_rDc
- 후방 장애물 인식. 후진 불가능 https://www.youtube.com/watch?v=bDmryylZ1Io
- 좌측 장애물이 있어 좌회전만 불가능 https://www.youtube.com/watch?v=hXixcmgLJZ4